






The Composite Swarm installation designed by Roland Snooks is an architectural prototype exploring the relationship of robotic fabrication, composite materials and algorithmic design. The complexity of the form and the excess of ornament make the prototype structurally efficient and minimize the amount of material used. The prototype is 2.5 meters tall, with a surface thickness of less than 1mm. A swarm algorithm based on the self-organizing behavior of ants was developed for the project to negotiate between and compresses surface, structure and ornament into a single irreducible form.
The installation combines a fiber-composite surface and flexible foam components. Both of these elements are too flexible to be self-supporting, however the combination of the two creates a highly rigid composite. The components imprint a network of small corrugations in the fiber-composite surface that provide structural depth. The structural strength is achieved through a combination of the pattern of corrugations and the double curvature of the overall surface. Paradoxically it is the complexity of the surface and the ornamental patterns that makes the form efficient. Rather than attempting to simply optimize the structure the project explores how structure, surface and ornament operate together to form an expressive and efficient whole.
The multi-agent algorithms developed for the project are based on the behavior of swarms and social insects such as ants. The surface of the installation is created through a digital swarm of components that are programmed to make a continuous (manifold) surface. The ornamental components are distributed with an algorithm based on the logic of ants that form bridges by connecting their bodies. The connection between components creates a complex ornamental and structural network. This algorithmic approach is part of Kokkugia’s Behavioral Formation design process that draws on the logic of swarm intelligence and operates through multi-agent algorithms.
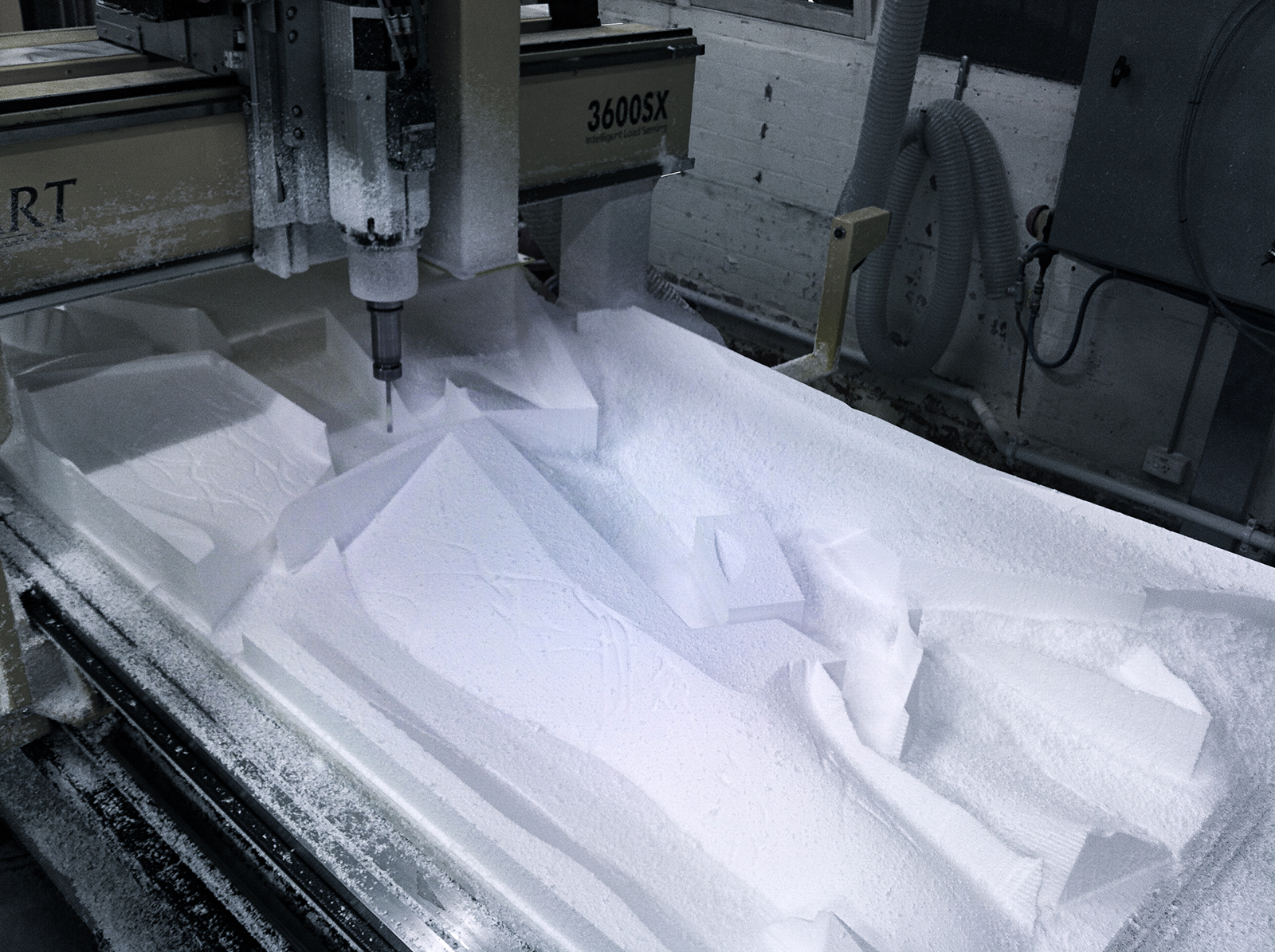
The installation was fabricated by laminating cast polyurethane components and glass fiber. The mold for the surface was robotically and CNC milled from foam, before being assembled and coated in epoxy to achieve a smooth finish. The components were laminated between two layers of fiber-composite and infused with epoxy resin under vacuum pressure.
The prototype is intended to test composite tectonics for the future application to larger architectural projects.
Design Team: Roland Snooks (Project Leader), James Pazzi, Marc Gibson
Fabrication Team: Roland Snooks, James Pazzi, Marc Gibson, Michael Ferreyra, Dave Smith, Benjamin Verzijl, Tess O’Meara, Matthew Lochert, Jack Dowling, Steph Lancuba, Kelvin Chai, Hesameddin Mohamed, Anastasiya Vituseevych, I Kio Kung, Kendra Reid, Min Ji Lee, Mercedes Mambort, Patrick Anglin, Nil Corominas Faja, Nathan Demoel.
The project was supported by the Design Research Institute and the Architectural Robotics Lab at RMIT University.